雷达配置
安装 Livox-SDK2¶
cd ~
sudo apt update
sudo apt install -y cmake git
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd Livox-SDK2
mkdir -p build
cd build
cmake ..
make -j$(nproc)
sudo make install
sudo ldconfig
检查是否安装成功¶
ldconfig -p | grep LivoxSdkCore 对当前 Livox-SDK2 安装结果不够可靠。更直接的检查方式是看 livox_ros_driver2 编译时真正会查找的 SDK 库文件是否存在:
如果第一条能看到 liblivox_lidar_sdk_shared.so,说明 ROS 2 驱动后续链接 SDK 的关键动态库已经安装到位。
卸载旧版 Livox-SDK2¶
如果需要清理旧版本,可执行:
准备 livox_ros_driver2¶
仓库已经通过 submodule 提供 driver/livox_ros_driver2,构建前需要先执行:
cp ~/venom_ws/src/venom_vnv/driver/livox_ros_driver2/package_ROS2.xml \
~/venom_ws/src/venom_vnv/driver/livox_ros_driver2/package.xml
livox_ros_driver2 常用命令¶
本仓库标准构建仍使用 快速开始 中的 colcon build 命令。livox_ros_driver2 官方 README 还提供了一个独立构建脚本,可用于单独验证驱动包:
cd ~/venom_ws/src/venom_vnv/driver/livox_ros_driver2
source /opt/ros/humble/setup.bash
./build.sh humble
这个脚本会清理 ~/venom_ws/build、~/venom_ws/install 等构建目录,所以常规整包编译仍优先使用主仓库的标准 build 命令。
官方 ROS 2 启动命令格式是:
MID360 常用 launch:
| 命令 | 作用 |
|---|---|
ros2 launch livox_ros_driver2 rviz_MID360_launch.py |
连接 MID360,发布 PointCloud2 格式点云,并自动打开 RViz |
ros2 launch livox_ros_driver2 msg_MID360_launch.py |
连接 MID360,发布 Livox 自定义点云消息 |
如果启动时报类似 cannot open shared object file,先在当前终端补充动态库路径:
配置网卡静态 IP¶
建议把连接 Mid360 的有线网卡配置为静态 IP。
推荐配置:
- 本机有线网卡 IP:
192.168.1.50 - 子网掩码:
255.255.255.0 - 网关:
192.168.1.1
Mid360 默认地址通常为:
192.168.1.1xx
其中 xx 是雷达序列号后两位。比如序列号末两位是 33,则雷达 IP 可对应理解为 192.168.1.133。
配置完成后,WiFi 可以继续保持联网,用于 SSH、NoMachine 或其他网络访问。
网络优先级示意:
配置雷达路由优先级¶
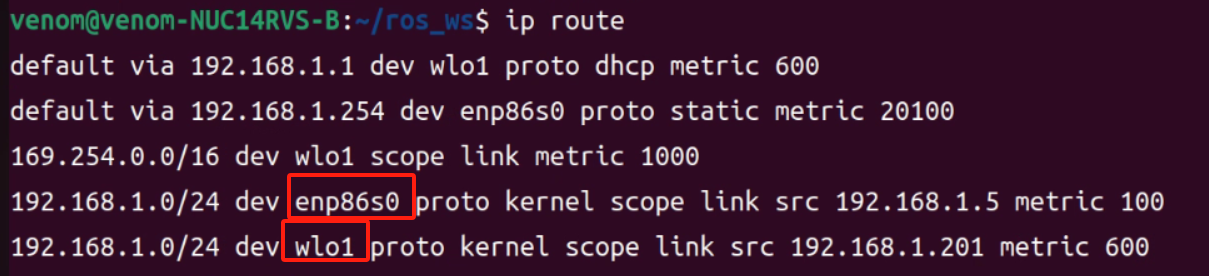
如果电脑同时连接 WiFi 和雷达有线网口,系统可能会把 192.168.1.0/24 这个整段路由挂到有线网卡上,影响其他网络访问。现场调试时可以把整段路由删掉,只保留到雷达 IP 的单机路由。
先查看当前路由表:
在输出中找到连接雷达的有线网卡那一行,通常类似:
不要直接复制下面示例命令。每台电脑的有线网卡名、主机 IP、metric 和雷达 IP 都可能不一样,必须从你自己的 ip route 输出里复制网卡名,并把雷达 IP 改成实际值。
先删除有线网卡上的整段路由:
再新增只指向雷达本机 IP 的路由。下面以雷达 IP 192.168.1.133、本机有线网卡 IP 192.168.1.50、网卡名 enp3s0 为例:
检查系统访问雷达时是否走有线网卡:
如果重启后需要自动恢复这条路由,可以把删除旧路由和新增单机路由的命令写入 rc.local。
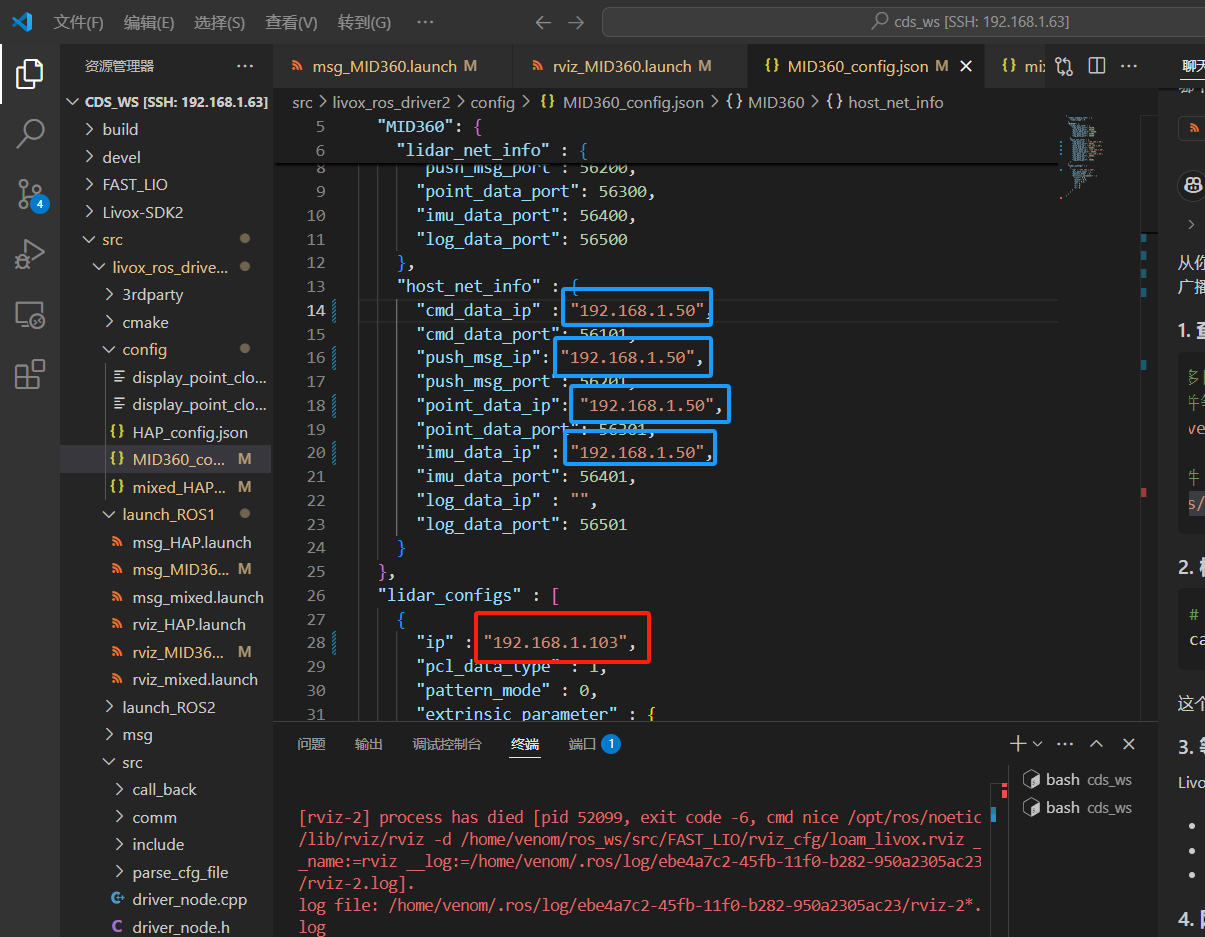
修改 MID360 配置文件¶
打开:
重点确认以下字段:
其中:
cmd_data_ip和push_msg_ip应与本机有线网卡静态 IP 一致lidar_ip应改成你自己 Mid360 的实际 IP
如果已经完成编译,也建议同步检查安装目录下的配置文件:
配置文件示意:
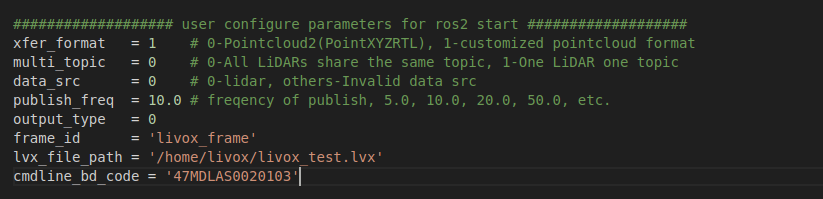
如果还需要同步检查 launch 文件中的相关配置,可参考:
livox_ros_driver2/launch_ROS2/rviz_MID360_launch.pylivox_ros_driver2/launch_ROS2/msg_MID360_launch.py
对应示意:
雷达验证¶
先测试网络是否连通:
如果你的雷达不是这个地址,请把上面的 IP 替换成实际值。
然后启动驱动验证:
下一步¶
如果你还需要处理网络优先级、静态路由或开机自动执行这些命令,请继续阅读 rc.local.